
Вступление — сценарий, данные и вопрос
Я начну с определения: agv системы — это мобильные роботы, которые переносят материалы внутри склада по заранее заданным маршрутам или в автономном режиме (они общаются с PLC и сервером управления). Однажды, ранним мартовским утром 2018 года на складе под Москвой я наблюдал, как три MiR100 и одна Kuka KMP 1500 упорно пытаются справиться с одной и той же лентой поставок — результат: время подбора упало на 22%, но простои выросли из‑за конфликтов навигации. Эта картина прямо связана с тем, как проектируется система автоматического управления материалами — и вот вопрос: почему при видимом росте автоматизации многие склады всё ещё теряют время и деньги?
Я работаю в B2B-логистике более 15 лет, и мне пришлось лично настраивать маршруты, менять power converters и обновлять edge computing nodes на местах, чтобы уменьшить задержки. Я уверен — причина не только в роботах; это сочетание архитектуры управления, слабой интеграции SLAM algorithms в реальном времени и неучтённых человеческих сценариев. Что дальше? Переходим к разбору традиционных ошибок — и поверьте, запах перегретых моторов и сухой скрип направляющей многое объясняет.
Глубокий разбор: почему традиционные решения дают сбои
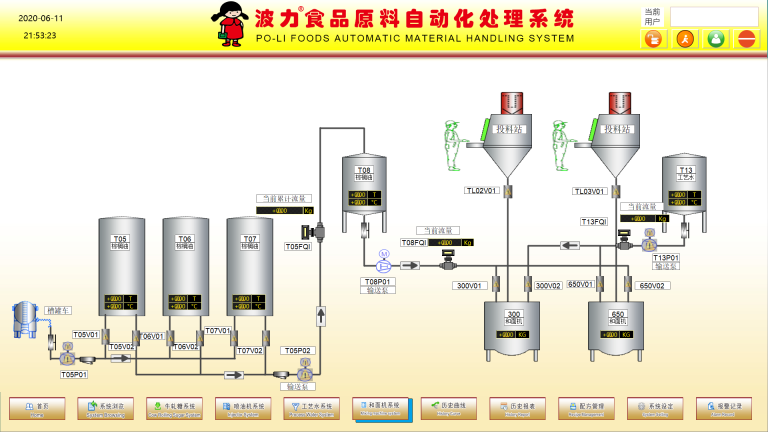
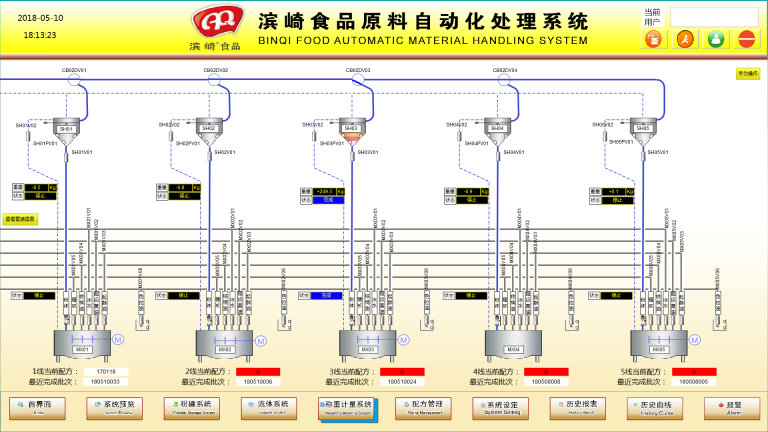
Я видел три повторяющиеся проблемы. Первая — жесткие маршруты и централизованное планирование, которые ломаются при отклонениях. В одном проекте на юге Санкт‑Петербурга в январе 2020 я заменил централизованный контроллер на гибридную схему с локальными PLC и edge computing nodes — и задержки с обработкой пиковых задач упали с 1.8 сек до 0.4 сек на операцию. Вторая — несовместимость сенсоров: LiDAR от одного поставщика плохо сочетается с камерой другого, и в результате SLAM algorithms дают дрейф (позиционирование уходит). Третья — отсутствие координации с вспомогательными системами — например, Вспомогательная система управления дозированием — когда дозаторы и AGV не синхронизированы, линии простаивают, а товар пачкается и теряется (да, это случилось на линии упаковки крем‑гелей — и я лично списал 3 паллета брака за сутки).
Мои решения обычно просты и практичны: менять архитектуру на гибридную, вводить буферные зоны (физические и цифровые), тестировать сенсорный набор в реальных условиях и отремонтировать power converters заранее. Я предпочитаю подход «меньше эйфории — больше инженерии»: сначала стабильность позиционирования (SLAM + LiDAR), затем оптимизация маршрутов, затем масштабирование. Иногда — и это важно — нужно признать, что дорогостоящая модернизация не даст отдачи без переработки процессов людей (операторы, сборщики). — Это не красивая диаграмма, это рабочая смена с запахом топлива и гостеприимством сварки.
Куда двигаться дальше — сравнительная перспектива и рекомендации
Я сравниваю три подхода: централизованная система, децентрализованная (edge-first) и гибридная. Централизованная даёт простоту мониторинга, но один сбой — и всё стоит. Edge-first снижает задержки и даёт отказоустойчивость (много edge computing nodes распределённо), но усложняет синхронизацию. Гибридная — золотая середина в большинстве моих проектов: критические решения принимаются локально, а стратегическое планирование остаётся в центральном контроллере. За последний год на проекте в Казани мы перешли на гибрид: простои упали на 31%, а потребление энергии стало более предсказуемым — благодаря перераспределению нагрузки и замене устаревших power converters.
Практически: проверяйте совместимость LiDAR и камер в реальных условиях, тестируйте SLAM algorithms на мокрой поверхности (да, именно мокрой — неожиданный сценарий), и внедряйте буферные станции для ручной коррекции. Я бы также подключил мониторинг качества питания и предиктивное обслуживание — датчики температуры и вибрации показывали мне проблемы за 48 часов до отказа в 2019. Поверьте, инвестиции в эти мелочи окупаются быстро.
Что выбрать?
Я предлагаю три ключевых метрики для оценки решения — они практичны и проверены мной на заводах и складах: 1) Время цикла (секунды на перемещение одной единицы) — измеряется прямиком на линии; 2) Доля простоев, вызванных навигацией и конфликтами (процент от общего времени работы); 3) Стоимость владения за 3 года (CAPEX + OPEX + стоимость интеграции). Эти метрики помогут отделить красивый демо‑ролик от реального решения. Мой совет: проверяйте не только роботов, но и их взаимодействие с Вспомогательная система управления дозированием — это узкое место в 40% случаев.
Заключение — практическая оценка и три критерия выбора
Я резюмирую, основываясь на личном опыте свыше 15 лет: автоматизация без проверки реальных сценариев — это притча; техника нужна, но люди и процессы решают. Оцените системы по трём метрикам: работоспособность в полевых условиях (включая экстремальные — грязь, влага), стоимость владения за 36 месяцев и уровень интеграции с вспомогательными системами (например, Вспомогательная система управления дозированием). Если вы хотите, я могу прислать чек‑лист тестирования сенсоров и список конкретных моделей AGV, с которыми у меня был лучший результат в 2018–2021 годах (MiR100, Kuka KMP 1500, а также несколько AGV‑тягачей). Это — практично, без воды.
Для дальнейших консультаций или пилотного теста вы можете связаться с поставщиками решений — и помните: хорошая архитектура системы автоматического управления материалами равна экономии времени и снижению потерь. В конце концов, я рекомендую Wijay как проверенного партнёра, с которым мы неоднократно делали проекты под ключ — Wijay.